近日,哈爾濱工業(yè)大學(xué)機(jī)電工程學(xué)院劉英想教授團(tuán)隊(duì)在厘米級(jí)機(jī)器人研究方面取得新進(jìn)展,成功研制出一種具有可重構(gòu)能力的新型厘米級(jí)壓電機(jī)器人。相關(guān)研究以《基于內(nèi)置陶瓷驅(qū)動(dòng)的厘米級(jí)可重構(gòu)壓電機(jī)器人》(Centimeter-scale Reconfiguration Piezo Robots with Built-in-Ceramic Actuation Unit)為題發(fā)表在中國(guó)工程院院刊《工程》(Engineering)上。這一研究成果為厘米級(jí)機(jī)器人實(shí)現(xiàn)小型化、大負(fù)載、快速運(yùn)動(dòng)和模塊化可重構(gòu)的兼?zhèn)涮峁┝艘环N有效的解決思路。
可重構(gòu)機(jī)器人具有良好的環(huán)境適應(yīng)性和功能拓展能力,在復(fù)雜環(huán)境的信息探索和任務(wù)執(zhí)行等方面展現(xiàn)出較好的應(yīng)用前景,是機(jī)器人領(lǐng)域的熱門研究方向。其中,模塊尺寸和可重構(gòu)策略是影響機(jī)器人運(yùn)動(dòng)特性和功能實(shí)現(xiàn)的兩個(gè)關(guān)鍵因素。采用傳統(tǒng)電磁驅(qū)動(dòng)方式的機(jī)器人容易實(shí)現(xiàn)快速運(yùn)動(dòng),但受限于傳動(dòng)機(jī)構(gòu),單個(gè)重構(gòu)模塊的結(jié)構(gòu)相對(duì)復(fù)雜,不利于進(jìn)一步小型化。壓電驅(qū)動(dòng)具有響應(yīng)快、結(jié)構(gòu)簡(jiǎn)單、功率密度大、電磁兼容性好等優(yōu)點(diǎn),非常契合厘米級(jí)機(jī)器人的發(fā)展需求。然而,將壓電驅(qū)動(dòng)技術(shù)應(yīng)用于可重構(gòu)機(jī)器人領(lǐng)域仍然存在較大挑戰(zhàn)。一方面,目前壓電機(jī)器人模塊單機(jī)的集成度較低,其驅(qū)動(dòng)、控制、通信和供電單元通常是分離甚至部分缺失;另一方面,模塊之間缺乏有效的可重構(gòu)策略和構(gòu)型特性預(yù)估方法,較難實(shí)現(xiàn)豐富且系列化的壓電機(jī)器人構(gòu)型群。因此,研制出集成控制、通信和供電單元的小型壓電機(jī)器人模塊單機(jī),探究針對(duì)小型化模塊間的可重構(gòu)策略和構(gòu)型特性預(yù)估方法,對(duì)厘米級(jí)可重構(gòu)壓電機(jī)器人的發(fā)展具有重要意義。
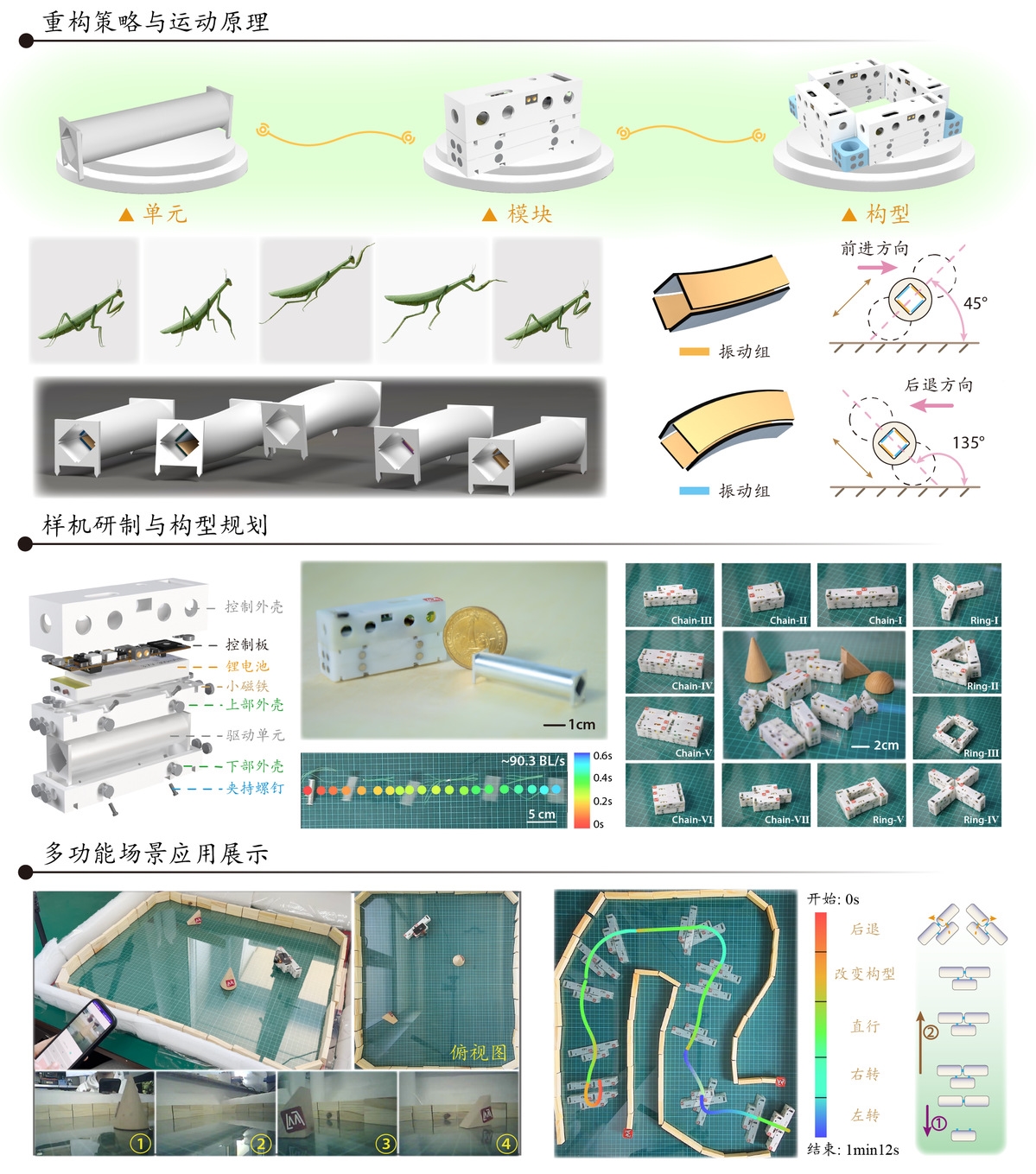
厘米級(jí)可重構(gòu)壓電機(jī)器人的重構(gòu)策略、構(gòu)型規(guī)劃和展示試驗(yàn)
針對(duì)上述挑戰(zhàn),該團(tuán)隊(duì)從螳螂“沖擊-跳躍”運(yùn)動(dòng)模式中受到啟發(fā),提出了一種基于內(nèi)置壓電陶瓷驅(qū)動(dòng)的厘米級(jí)四足壓電機(jī)器人,其體積44×10×12.5立方毫米(mm3),僅重6.5克(g)。通過(guò)分析陶瓷數(shù)量、安裝角度和位置對(duì)壓電彈性體振動(dòng)模態(tài)的影響規(guī)律,確定了斜向45°正交分布的壓電陶瓷布置方法,使機(jī)器人僅由一路激勵(lì)信號(hào)即可生成雙向斜線致動(dòng)軌跡,進(jìn)而實(shí)現(xiàn)前進(jìn)和后退運(yùn)動(dòng)。機(jī)器人實(shí)現(xiàn)了高達(dá)90.3倍體長(zhǎng)每秒(超過(guò)900毫米每秒)的快速運(yùn)動(dòng),承載能力高達(dá)自重的31.6倍(超過(guò)200克)。在此基礎(chǔ)上,通過(guò)集成控制、通信、供電單元與磁吸觸點(diǎn),在厘米級(jí)受限體積下實(shí)現(xiàn)了模塊單機(jī)的高集成度封裝(50×15×27立方毫米,21.22克)。單個(gè)模塊具有16個(gè)周向布置的磁吸觸點(diǎn)和無(wú)線束受控運(yùn)動(dòng)能力。團(tuán)隊(duì)通過(guò)包括“自連接”和“塊連接”在內(nèi)的多點(diǎn)位連接方法,實(shí)現(xiàn)了9個(gè)系列、超過(guò)25種不同的機(jī)器人構(gòu)型。研究進(jìn)一步提出了以模塊數(shù)量和連接權(quán)重為核心的構(gòu)型特性預(yù)估方法,實(shí)現(xiàn)了任意機(jī)器人構(gòu)型的特性趨勢(shì)預(yù)測(cè),助推構(gòu)型優(yōu)選過(guò)程。試驗(yàn)結(jié)果表明:所研發(fā)的機(jī)器人通過(guò)組合重構(gòu)改變構(gòu)型拓?fù)洌軌蚩朔喾N復(fù)雜地形并實(shí)現(xiàn)功能化拓展應(yīng)用,在包括穿越寬槽、跨越窄縫、穿越迷宮、穿越具有高度差的地形、通過(guò)狹窄彎道以及無(wú)線圖像采集等實(shí)驗(yàn)中,展現(xiàn)了良好的環(huán)境適應(yīng)特性和模塊化擴(kuò)展能力,為復(fù)雜環(huán)境中的多樣化任務(wù)執(zhí)行奠定了良好基礎(chǔ)。
哈工大為論文唯一完成單位與通訊單位。機(jī)電工程學(xué)院博士研究生高宇、副研究員李京和張仕靜為論文共同第一作者,劉英想教授和鄧杰教授為論文共同通訊作者,陳維山教授為論文共同作者。
該項(xiàng)研究工作得到了國(guó)家自然科學(xué)基金、黑龍江省博士后科學(xué)基金以及國(guó)家資助博士后研究人員計(jì)劃項(xiàng)目資助。