近日,中國科學院合肥物質院等離子體所團隊在聚變堆重載機械臂研發(fā)、智能控制算法研究方面取得多項進展,相關成果發(fā)表于中國科學院一區(qū)Top期刊上。
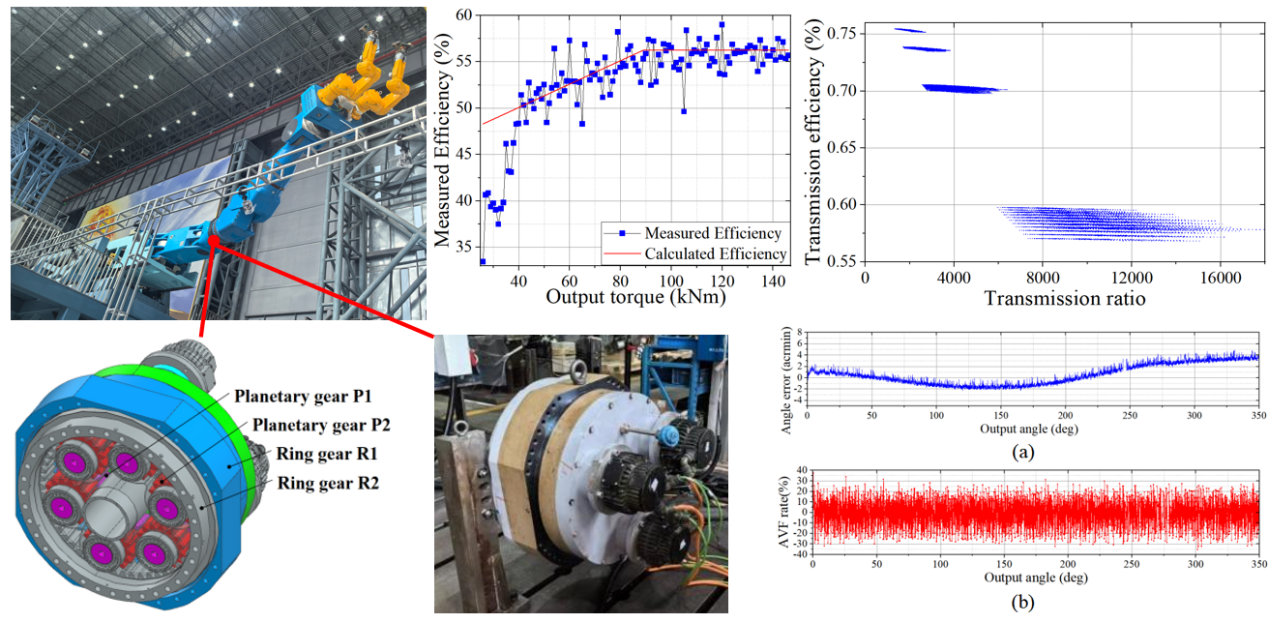
針對聚變堆內部部件維護的大負載和高精度要求,程羊等人等提出了一種專為重型機器人設計的新型高扭矩關節(jié),其核心創(chuàng)新在于取消太陽齒輪的行星傳動系統(tǒng)。為突破傳統(tǒng)空心齒輪箱因動力線纜與控制線纜中央空間不足的局限,該設計通過移除太陽齒輪并重新布局電機軸線,最大限度擴展了中央通道。該三階段傳動系統(tǒng)以13806:1的超高傳動比為特點,在保證緊湊結構的同時滿足扭矩需求。通過集成優(yōu)化模型成功實現(xiàn)了傳動比、效率(最高達58.0%)及應力分布的全面優(yōu)化,構建出完整的系統(tǒng)設計工具箱。關節(jié)認證件測試驗證了該方案可行性,不僅輸出扭矩達到139千牛米,彈性反沖值也低至4.86角分。實驗結果證明該設計在高扭矩密度、精準控制和高效線纜布局方面具有顯著優(yōu)勢,這些特性對于先進重型載荷機器人而言至關重要。
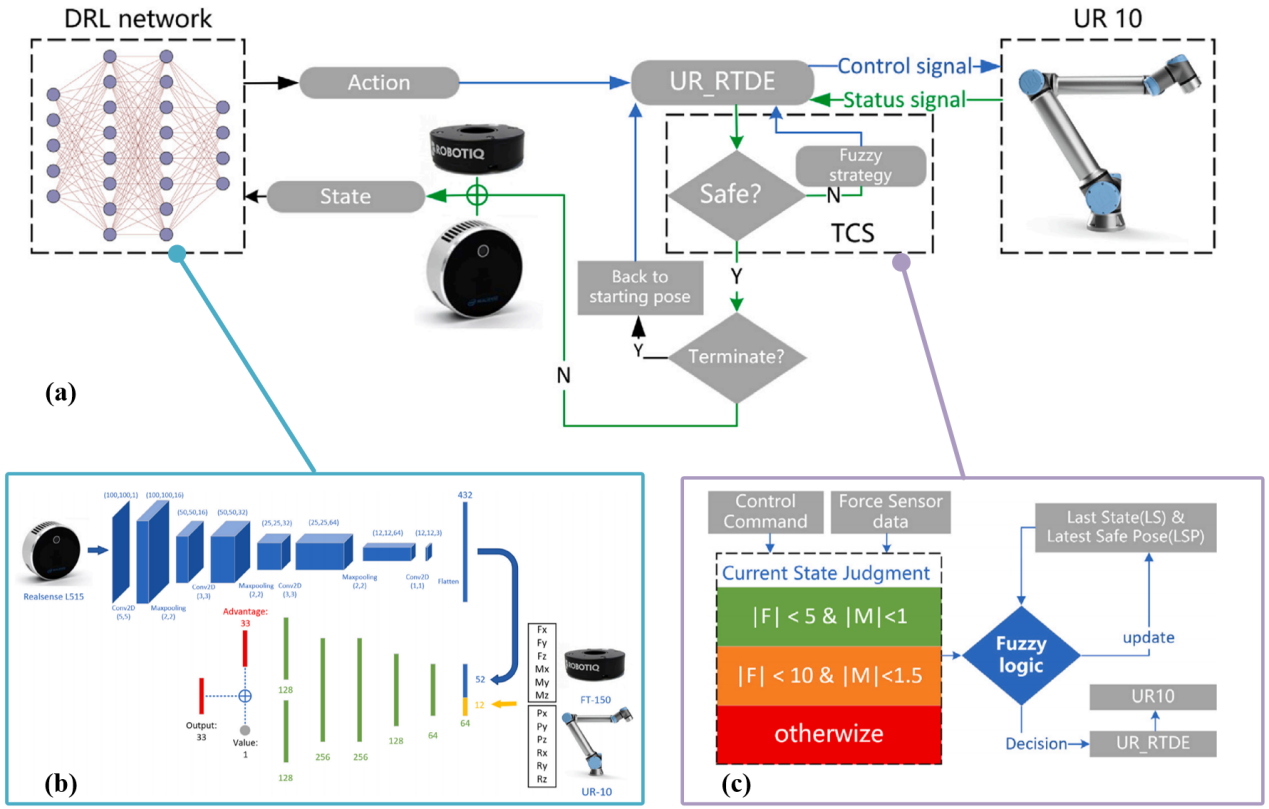
傳統(tǒng)軸孔裝配方法僅依賴光學或力/力矩
傳感器,存在精度有限或對準效率低的問題。殷若塵等人提出一種基于深度強化學習的多傳感器融合方法,結合二維相機與力/力矩傳感器數(shù)據(jù),模擬人類手眼協(xié)調機制,以應對輻射環(huán)境和光滑金屬表面等挑戰(zhàn)性條件。通過多輸入分支神經(jīng)網(wǎng)絡融合異構傳感信息,并在裝配過程中動態(tài)調整數(shù)據(jù)權重,實現(xiàn)了快速且高精度的裝配。實驗表明,該方法在軸孔間隙小于0.1毫米的剛性裝配任務中表現(xiàn)優(yōu)異,兼具高成功率和安全性。本研究證明僅憑二維攝像頭即可完成高精度軸孔裝配,對輻射環(huán)境等特殊場景下的自動化操作具有推進作用。
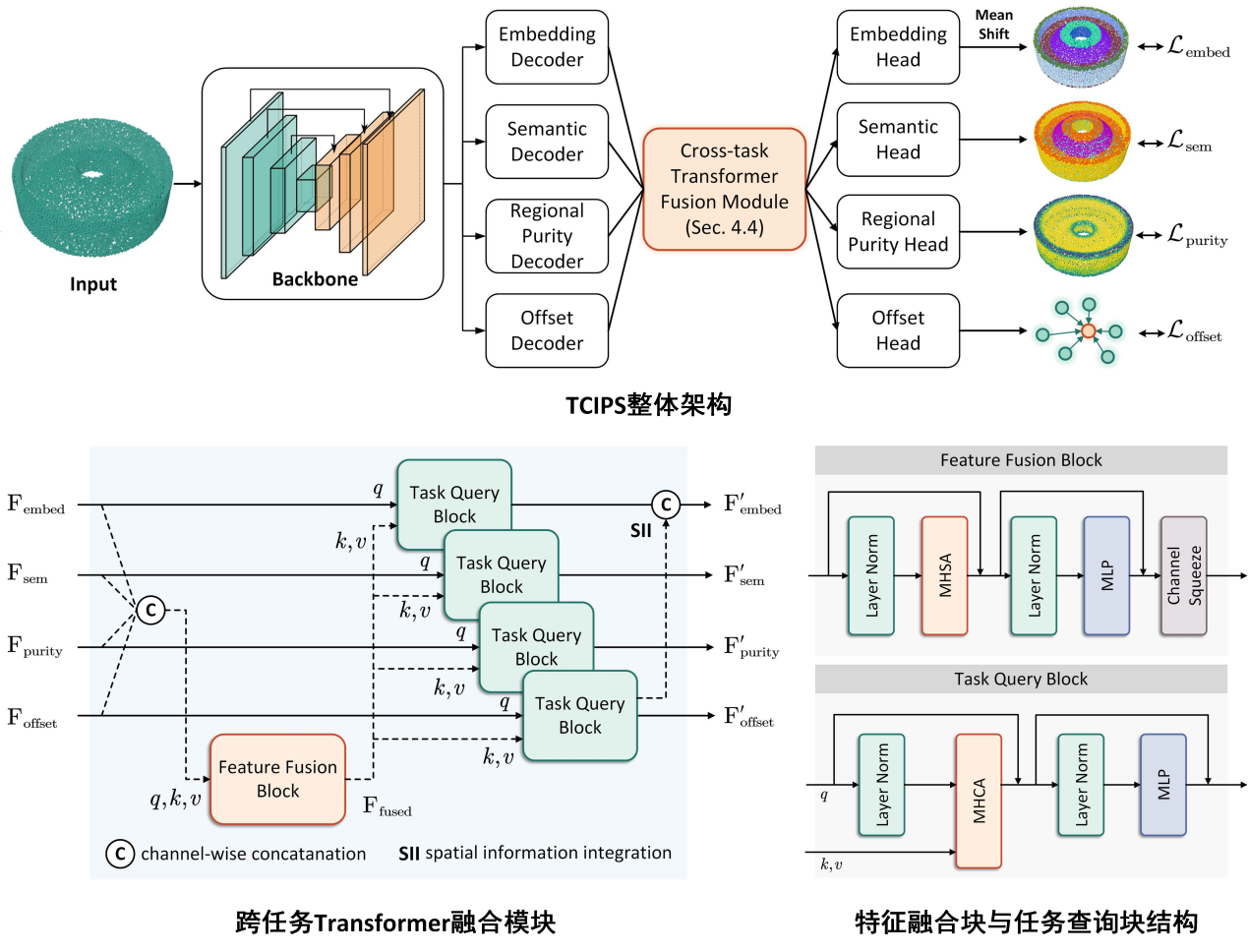
在聚變遙操作維護中,環(huán)境感知需獲取實例與語義信息以識別定位孔洞、管道、焊縫等目標。基元分割作為核心任務,旨在從點云中分割出平面、球體、圓柱等幾何基元。傳統(tǒng)RANSAC方法調參耗時且對復雜曲面處理能力有限;現(xiàn)有深度學習法則多忽略任務交互與全局空間關系。為此,汪濤等人提出基于Transformer的跨任務交互基元分割模型TCIPS,利用其長程依賴建模優(yōu)勢增強任務間特征交互與空間關系感知。此外,引入無額外標注的輔助任——中心偏移預測與區(qū)域純度預測,通過加強空間拓撲與邊界感知進一步提升分割精度。實驗表明,TCIPS在公開與真實點云數(shù)據(jù)中均表現(xiàn)優(yōu)異,泛化能力強,在邊緣及復雜鄰接區(qū)域改善顯著。該研究提升了聚變維護環(huán)境的感知可靠性,也為三維基元分割提供了新思路。
陳嘉鴻等人基于重載機械臂結構,應用非線性模型預測控制進行高精度軌跡規(guī)劃,并構建數(shù)字孿生系統(tǒng),實現(xiàn)可視化監(jiān)控與自主決策,為聚變堆維護提供了智能化的解決方案。龐俊飛等面向聚變裝置真空室復雜環(huán)境的維護需求,提出了融合視覺伺服與深度強化學習的自動化軸孔對齊算法,并創(chuàng)新性地引入跨域遷移與柔順裝配策略,實現(xiàn)了毫米級間隙下的高精度自主裝配,具有在核聚變等高風險作業(yè)場景中的廣闊應用前景。
其中,程羊等人在IEEE/ASME Transactions on Mechatronics上發(fā)表了“A Novel Hollow Actuator for Heavy-duty Robotics”并獲得了授權發(fā)明專利1項;殷若塵等人在Engineering Applications of Artificial Intelligence上發(fā)表了“Mastering autonomous assembly in fusion application with learning-by-doing: A peg-in-hole study”;汪濤等人在Engineering Applications of Artificial Intelligence上發(fā)表了“Enhancing primitive segmentation through transformer-based cross-task interaction”。在第二十七屆中國機器人及人工智能大賽全國總決賽中,遙操作組陳嘉鴻等的作品“面向聚變堆維護的多自由度重載機械臂”和龐俊飛等的作品“聚變遙操作系統(tǒng)中高精度軸孔
裝配機器人”均獲一等獎。
圖1 重載機械臂關節(jié)及參數(shù)優(yōu)化
圖2 (a)深度強化學習框架示意圖,(b)多分支深度強化學習神經(jīng)網(wǎng)絡結構圖;(c)基于模糊控制的緩沖機制工作流程圖
圖3 基元分割方法