9月10日,上海科技大學生物醫(yī)學工程學院于游課題組和合作者在《科學進展》(Science Advances)上發(fā)表標題為“Printed sensing human-machine interface with individualized adaptive machine learning”的研究論文,報道了一種3D打印技術(shù)制備的多模態(tài)傳感柔性生物電子,結(jié)合個體間自適應的機器學習算法,打通了從控制、手勢識別到機器人觸覺感知反饋的交互路徑,并且進一步在智能假肢方面展現(xiàn)出巨大的應用潛力。
人機交互界面(HMI)是實現(xiàn)“人-機-環(huán)境”三元共融的核心,在智能制造、醫(yī)療健康、深空探測等領(lǐng)域具有廣闊的應用前景。現(xiàn)有的柔性人機交互界面系統(tǒng)面臨較多瓶頸,如核心傳感部件多依賴微納加工方法,工藝復雜、成本高昂;機器學習方法對個體生理差異和器件穿戴位置敏感,導致適應性差、重置標定建立模型的流程繁瑣;機器端感知維度單一,缺乏仿生皮膚的綜合性觸覺,難以完成精細的識別與交互任務。
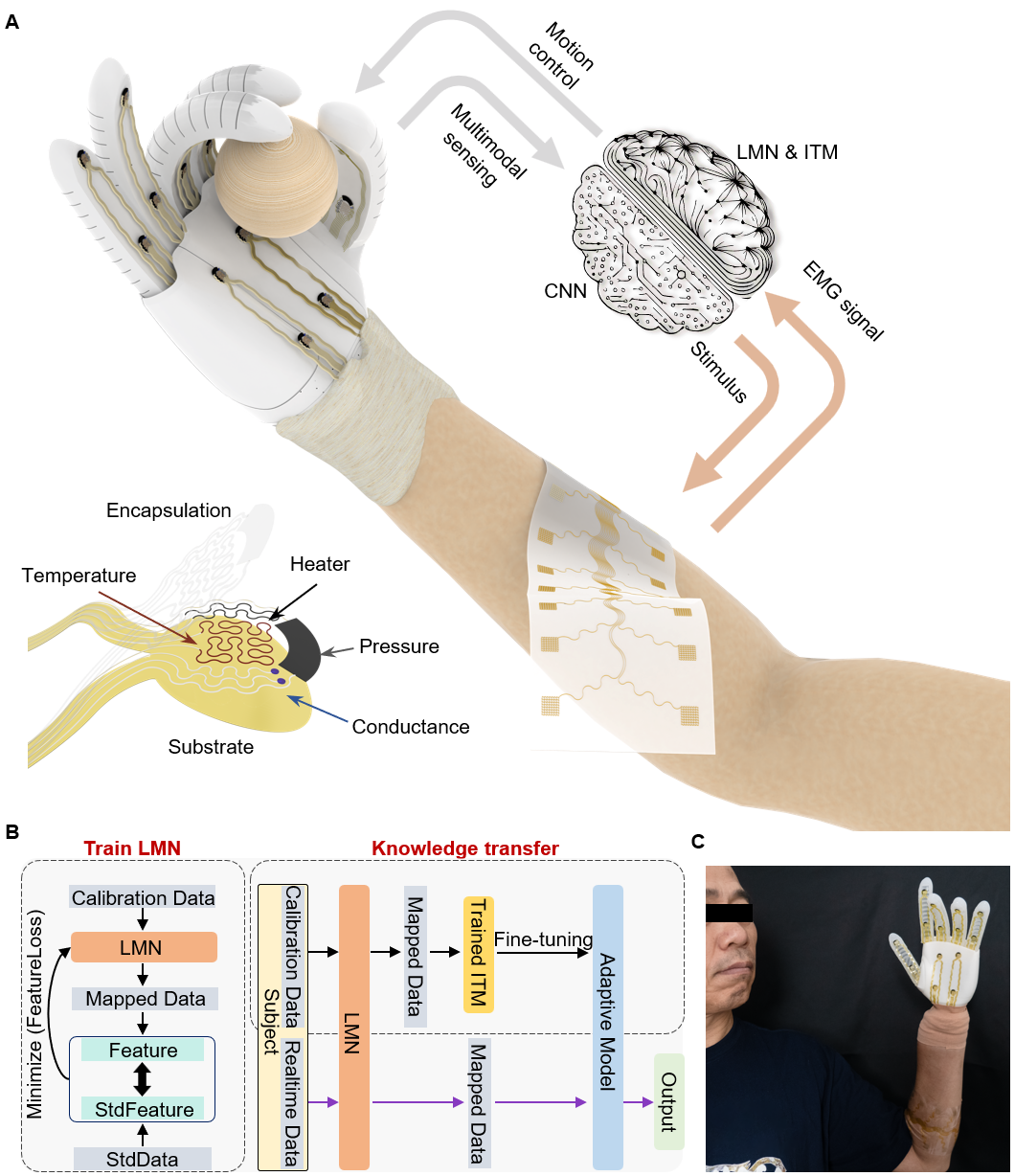
在此背景下,團隊結(jié)合多材料墨水直寫與精密激光加工技術(shù),實現(xiàn)了柔性電子與軟體機器手傳感器陣列的一體化、低成本、大規(guī)模制造。該工藝能夠以微米級精度打印包含壓力、溫度、電導率等多模態(tài)傳感器的高度集成化柔性器件(圖1A)。集成了柔性傳感陣列的氣動軟體手受人體肌電信號(EMG)控制,可根據(jù)不同意圖執(zhí)行對應動作,具備多模態(tài)傳感能力的機器手可以區(qū)分觸碰到的物體材質(zhì),并經(jīng)由電子皮膚反饋給人體相關(guān)信息。
針對生理電信號個體差異性問題,團隊設計了一種通道線性映射方法(LMN)結(jié)合遷移學習策略的自適應機器學習算法(圖1B)。該算法能夠在新用戶身上實現(xiàn)“少樣本迅速適應”,僅需數(shù)次動作校準即可完成模型的個性化適配,在14種復雜手勢的識別任務中,平均準確率高達98%以上,且系統(tǒng)延遲低至0.1秒。為了賦予軟體機器手多維度仿生觸覺,團隊還創(chuàng)新性地融合熱導率和電導率傳感,通過卷積神經(jīng)網(wǎng)絡進行數(shù)據(jù)解析,機器手結(jié)合傳感陣列能夠?qū)Χ噙_20種日常物品(如金屬、塑料、木材等)進行精準的材質(zhì)識別,準確率超過98%,極大地提升了機器人的環(huán)境感知與交互能力。
最終在一位前臂截肢的志愿者上開展應用測試,全面驗證了整個閉環(huán)交互系統(tǒng)的有效性和魯棒性(圖1C)。結(jié)果表明,即便在患者殘肢肌肉信號存在衰減和延遲的情況下,系統(tǒng)依然能以94.36%的準確率穩(wěn)定識別其手勢意圖,并驅(qū)動機器手完成相應動作,充分展示了該技術(shù)在下一代智能義肢領(lǐng)域的應用潛力。
圖1,(A)雙向信息采集和交互的柔性傳感生物電子示意圖;(B)自適應機器學習算法實現(xiàn)低樣本量遷移學習并完成模型的個性化適配;(C)智能假肢在前臂截肢者的實際應用。
上海科技大學生物醫(yī)學工程學院2024級博士研究生王國徽、生命科學與技術(shù)學院2021級本科生唐耀和生物醫(yī)學工程學院2023級碩士研究生羅欣冉為論文共同第一作者。上海交通大學醫(yī)學院附屬第六人民醫(yī)院宋文奇、上海科技大學助理教授于游為共同通訊作者,上海科技大學為第一完成單位。