自然界中動物的集群行為啟發了機器人學的發展,比如模仿蟻群的多機器人路徑規劃和模仿魚群的避障與協同控制。隨著生物學的進展和學科交叉的發展,發育生物學中的細胞集群行為機理也被用來指引機器人的發展,為機器人領域的仿生類生研究帶來了新的靈感。
中國科學院沈陽自動化研究所微納米課題組科研人員通過機器人集群實驗,驗證了胚胎發育中的“差異粘附假說”,為理解胚胎發育中形態發生和群體智能行為提供了新的研究手段。
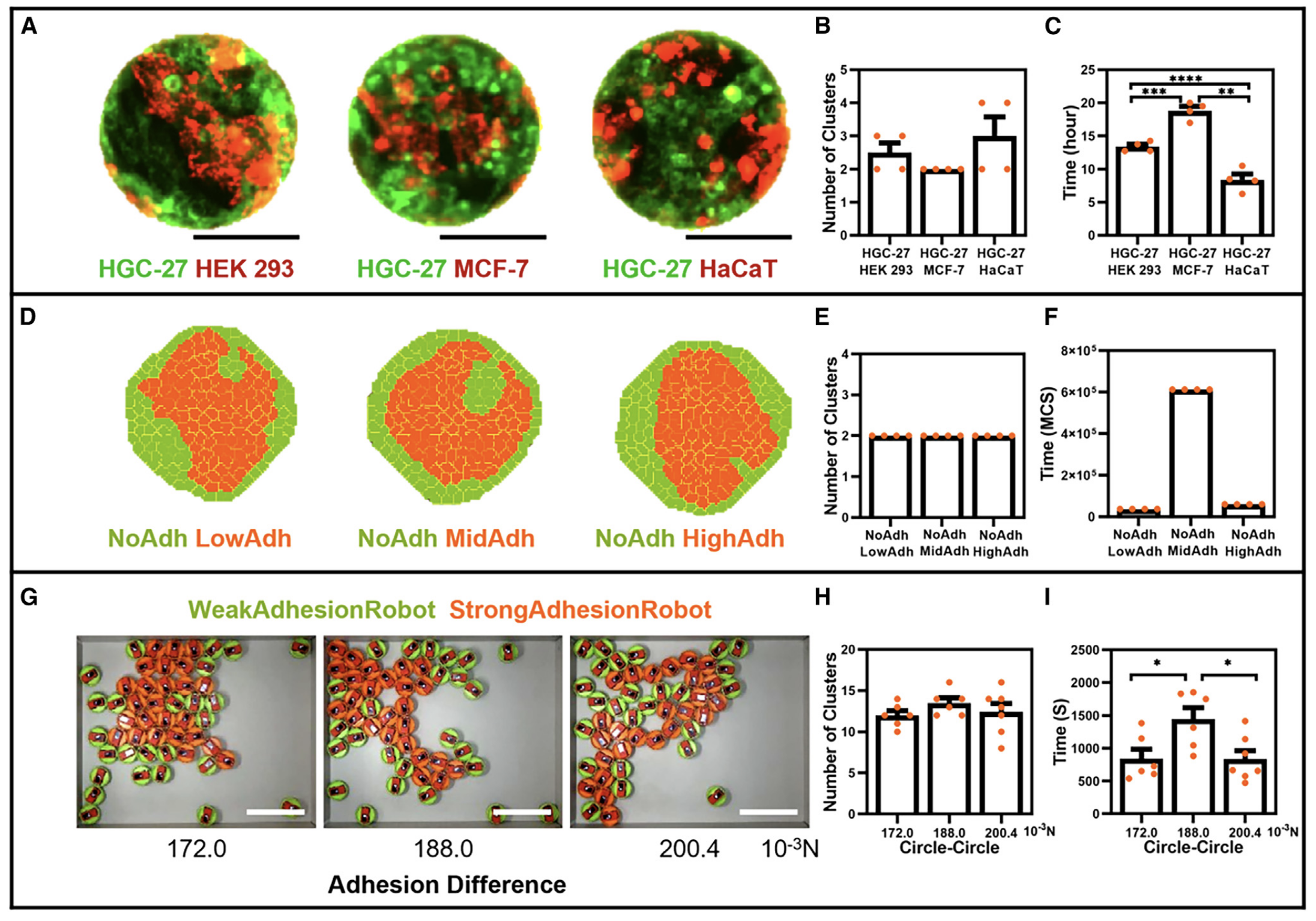
粘附差異水平與機器人集群(細胞集群)分選速度存在非線性關系
科研團隊設計了一套包含50個直徑10厘米的圓形機器人的集群系統,通過在外殼中嵌入不同強度的磁鐵模擬細胞間粘附力的差異。實驗發現了粘附力差異與分選速度之間的非線性關系:當機器人之間的模擬粘附力差異顯著或非常小時,分選排序快速完成;而在中等粘附力差異水平下,排序過程顯著變慢。這一發現隨后在細胞培養實驗中得到驗證,研究人員推測生物胚胎可能通過調控特定基因表達來控制細胞粘附力差異,從而精確控制發育過程中的時序節奏。相關研究成果發表于Cell Reports Physical Science期刊,楊永良研究員、劉連慶研究員為通訊作者,該研究得到了國家自然科學基金項目的支持。
該研究將工程科學與生命科學交叉融合,以機器人集群作為研究細胞集群行為的“物理模擬平臺”,揭示了生物發育過程中物理相互作用的關鍵作用。通過開展深度融合細胞行為的機器人集群控制方法研究,研究團隊致力于構建用于生命科學研究的硅基類生命機器人集群系統,實現機器人化的生命科學研究,這將有助于提高生命科學研究效率和擴展機器人技術應用領域。
國際學術期刊Nature旗下Nature Outlook專欄于7月15日發表的文章Robots demonstrate principles of collective intelligence中,關注并介紹了上述成果。(機器人學研究室)